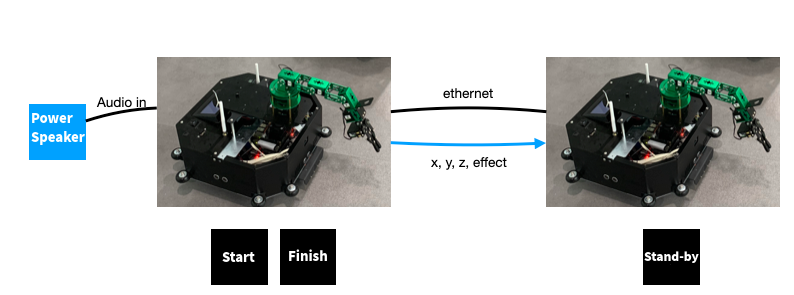
Dancing Robot
Lets dance with our robots
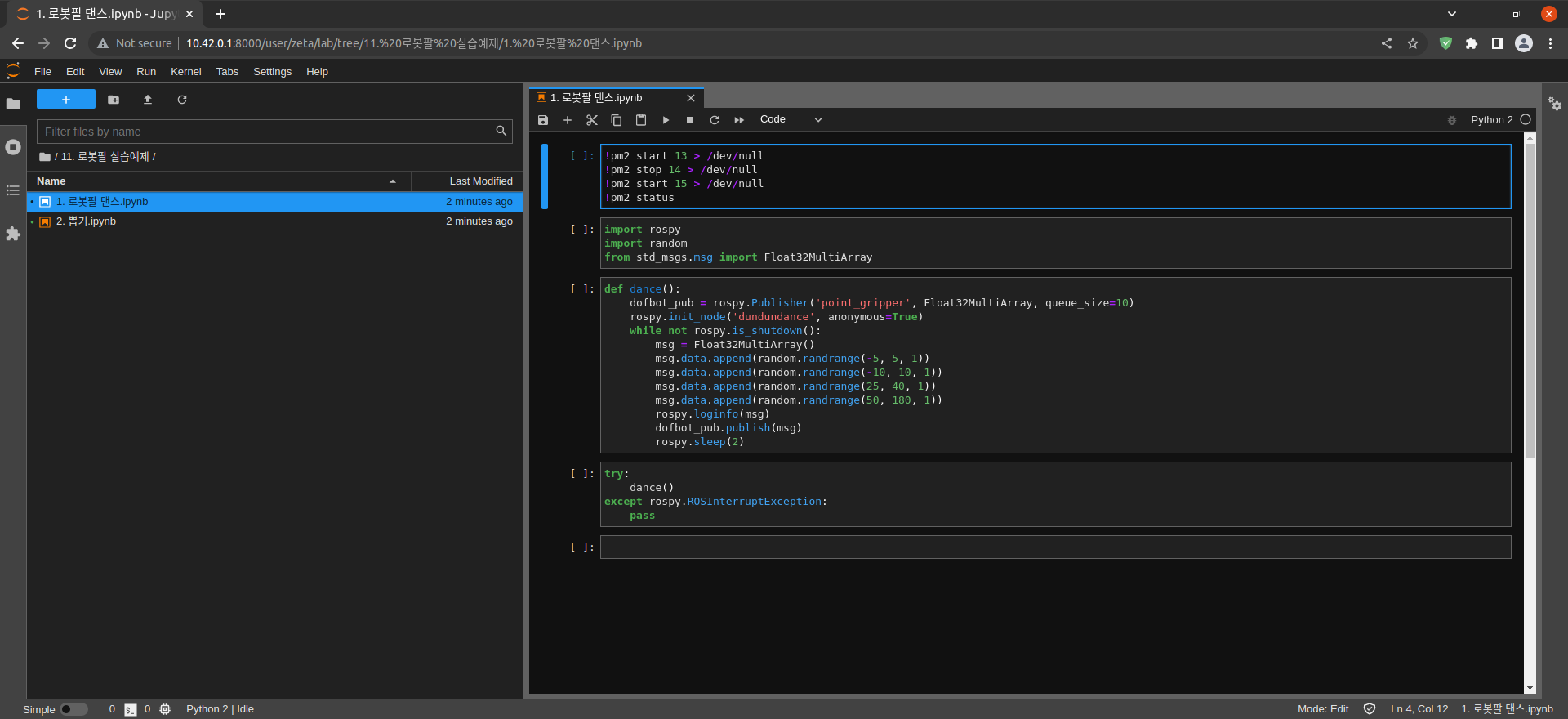
로봇팔.댄스.ipynb
- Running the cell codeCtrl + Enter
Randomly moving robot arm dance
!pm2 start 13 15 > /dev/null
!pm2 stop 14 > /dev/null
!pm2 status
import rospy
import time
import random
from pygame import mixer
from std_msgs.msg import Float32MultiArray
def dance():
cnt = 0
mixer.init(48000, 16, 2, 2048)
music = mixer.Sound('next_level.ogg')
music.set_volume(0.02)
music.play()
time.sleep(7)
dofbot_pub = rospy.Publisher('point_gripper', Float32MultiArray, queue_size=10)
rospy.init_node('dundundance', anonymous=True)
while not rospy.is_shutdown():
msg = Float32MultiArray()
msg.data.append(random.randrange(-5, 5, 1))
msg.data.append(random.randrange(-10, 10, 1))
msg.data.append(random.randrange(25, 40, 1))
msg.data.append(random.randrange(50, 180, 1))
#rospy.loginfo(msg)
dofbot_pub.publish(msg)
rospy.sleep(2.0)
cnt += 1
print(cnt)
if cnt == 75:
break
music.stop()
rospy.signal_shutdown("killed")
try:
dance()
except rospy.ROSInterruptException:
pass