Driving the Robot
01_wheel.ipynb
- Running the cell codeCtrl + Enter

import rospy
import json
from std_msgs.msg import String
import time
import math
Import python modules
pub = rospy.Publisher('/robot_command', String, queue_size=1)
rospy.init_node('zetabot', anonymous=True)
time.sleep(1)
Create zetabot Node
Create robot_command Topic Publisher
def move():
tmp = {"MoveForward": 1}
msg = json.dumps(tmp)
rospy.loginfo("Sent: %s", msg)
pub.publish(msg)
Create a move() function
Convert {“MoveForward”: 1} to Json String
Publish the converted message
def stop():
tmp = {"Stop": 0}
msg = json.dumps(tmp)
rospy.loginfo("Sent: %s", msg)
pub.publish(msg)
Create stop() function
Convert {“Stop”: 0} to Json String
Publish the converted message
def moveTo():
tmp = {"MoveDelta": -0.5}
msg = json.dumps(tmp)
rospy.loginfo("Sent: %s", msg)
pub.publish(msg)
Create a moveTo() function
Convert {“MoveDelta”: -0.5} to Json String
Publish the converted message
def moveTo(distance):
tmp = {"MoveDelta": distance}
msg = json.dumps(tmp)
rospy.loginfo("Sent: %s", msg)
pub.publish(msg)
Create a moveTo(distance) function
Convert {“MoveForward”: distance} to Json string
Publish the converted message
def turnTo():
tmp = {"TurnDelta": math.radians(45)}
msg = json.dumps(tmp)
rospy.loginfo("Sent: %s", msg)
pub.publish(msg)
Create turnTo() function
Convert 45° to radians
Convert {“TurnDelta”: math.radians(45)} to Json string
Publish the converted message
def turnTo(degree):
tmp = {"TurnDelta": math.radians(int(degree))}
msg = json.dumps(tmp)
rospy.loginfo("Sent: %s", msg)
pub.publish(msg)
Create turnTo(degree) function
Convert degree(°) to radians
Convert radian to int
Convert {“TurnDelta”: math.radians(int(degree))} to Json string
Publish the converted message
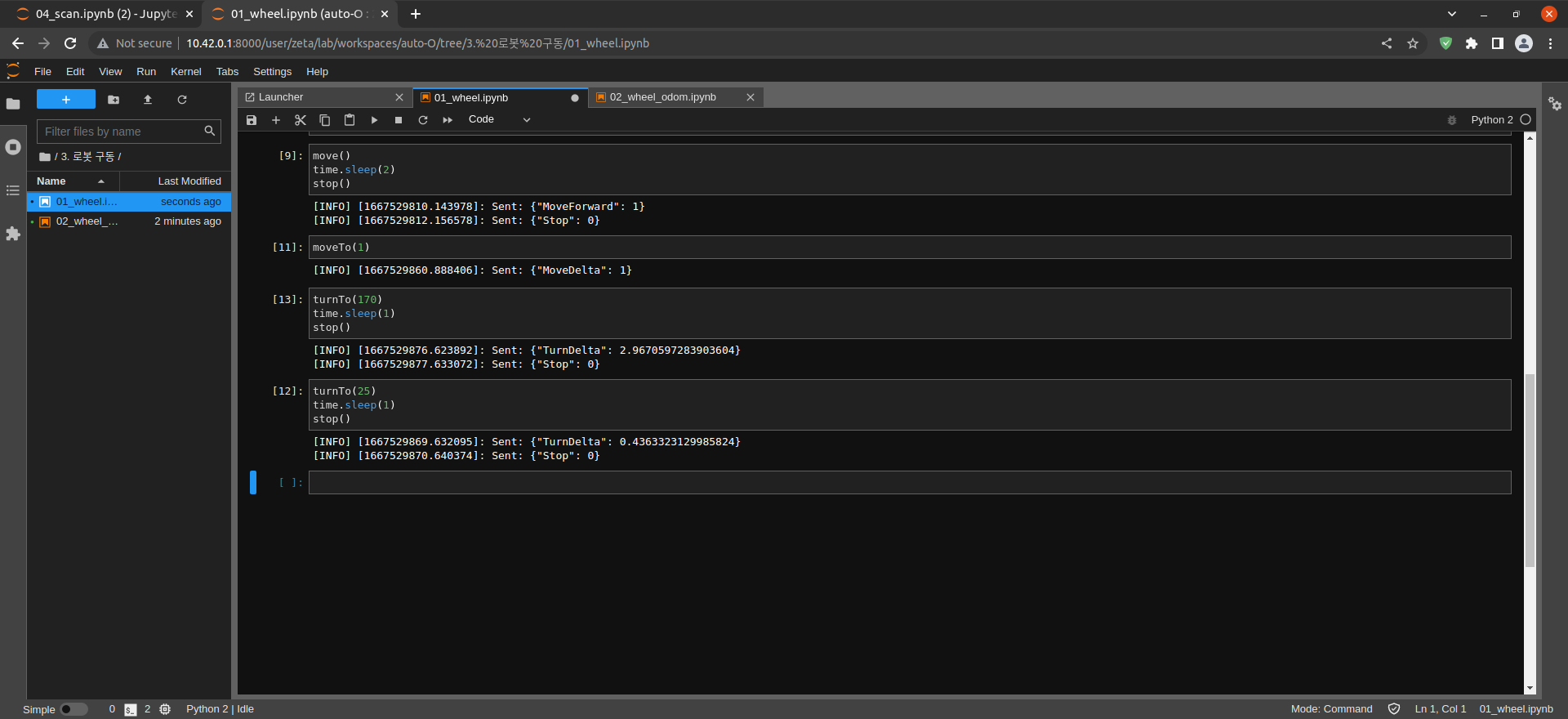
move()
time.sleep(2)
stop()
Run the move() function
2 second time delay
Run the stop() function
moveTo(1)
Execute the moveTo(distance) function
1 distance forward
turnTo(170)
time.sleep(1)
stop()
Run the turnTo(degree) function
170 degree rotation
1 second time delay
Run the stop() function
turnTo(25)
time.sleep(1)
stop()
Run the turnTo(degree) function
25 degree rotation
1 second time delay
Run the stop() function