Catching Robot
Let play catch with our robots
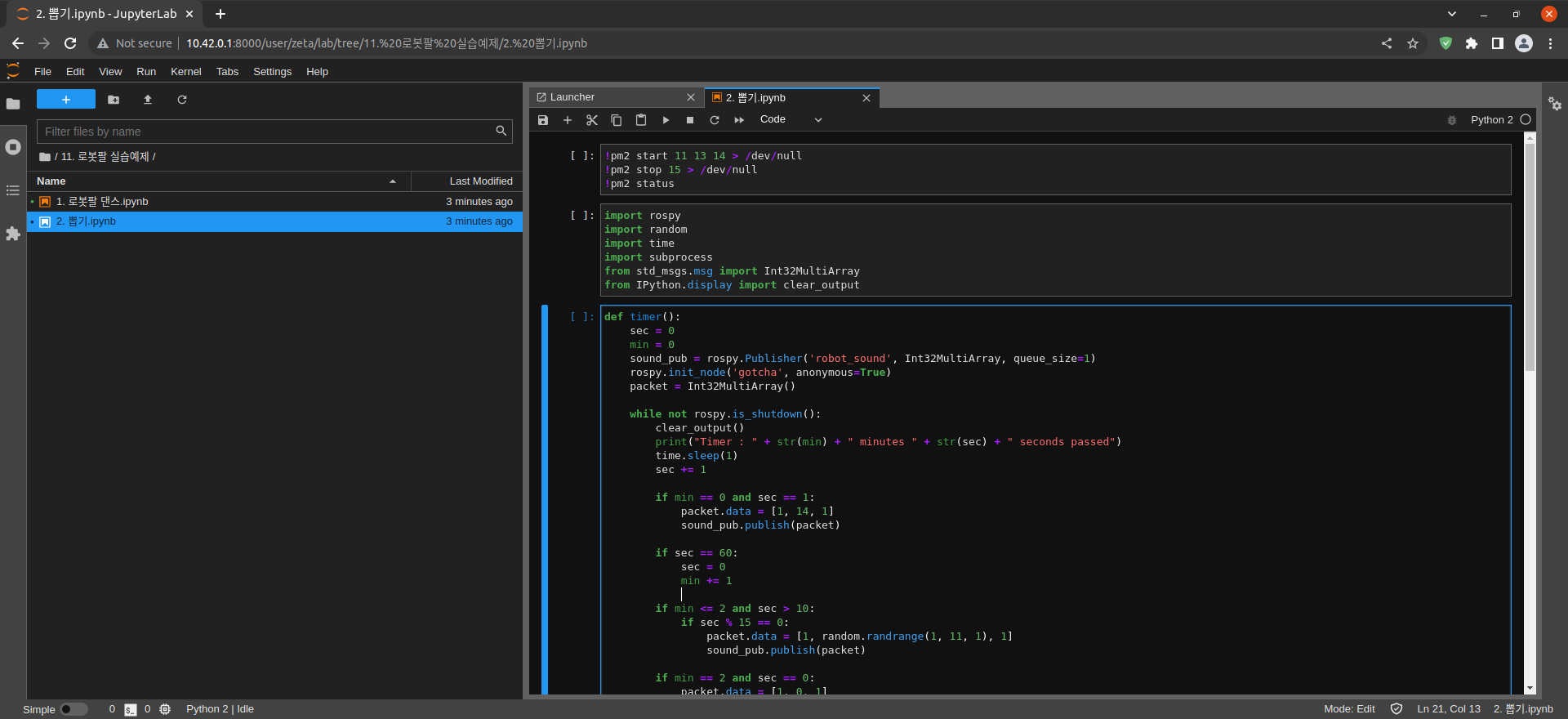
뽑기.ipynb
- Running the cell codeCtrl + Enter
3 minute time limit
Use the joystick to pick up objects
!pm2 start 11 13 14 > /dev/null
!pm2 stop 15 > /dev/null
!pm2 status
import rospy
import random
import time
import subprocess
from std_msgs.msg import Int32MultiArray
from IPython.display import clear_output
def timer():
sec = 0
min = 0
sound_pub = rospy.Publisher('robot_sound', Int32MultiArray, queue_size=1)
rospy.init_node('gotcha', anonymous=True)
packet = Int32MultiArray()
while not rospy.is_shutdown():
clear_output()
print("Timer : " + str(min) + " minutes " + str(sec) + " seconds passed")
time.sleep(1)
sec += 1
if min == 0 and sec == 1:
packet.data = [1, 14, 1]
sound_pub.publish(packet)
if sec == 60:
sec = 0
min += 1
if min <= 2 and sec > 10:
if sec % 15 == 0:
packet.data = [1, random.randrange(1, 11, 1), 1]
sound_pub.publish(packet)
if min == 2 and sec == 0:
packet.data = [1, 0, 1]
sound_pub.publish(packet)
if min == 3 and sec == 0:
packet.data = [1, 13, 1]
sound_pub.publish(packet)
command = "pm2 stop 11 && rostopic pub -1 /cmd_vel geometry_msgs/Twist '{linear: {x: 0.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 0.0}}'"
subprocess.call((command.split('\n')), shell=True)
break
rospy.signal_shutdown("killed")
try:
timer()
except rospy.ROSInterruptException:
pass