Global / Local Coastmap
01_costmap_dy_rc.ipynb
- Running the cell codeCtrl + Enter
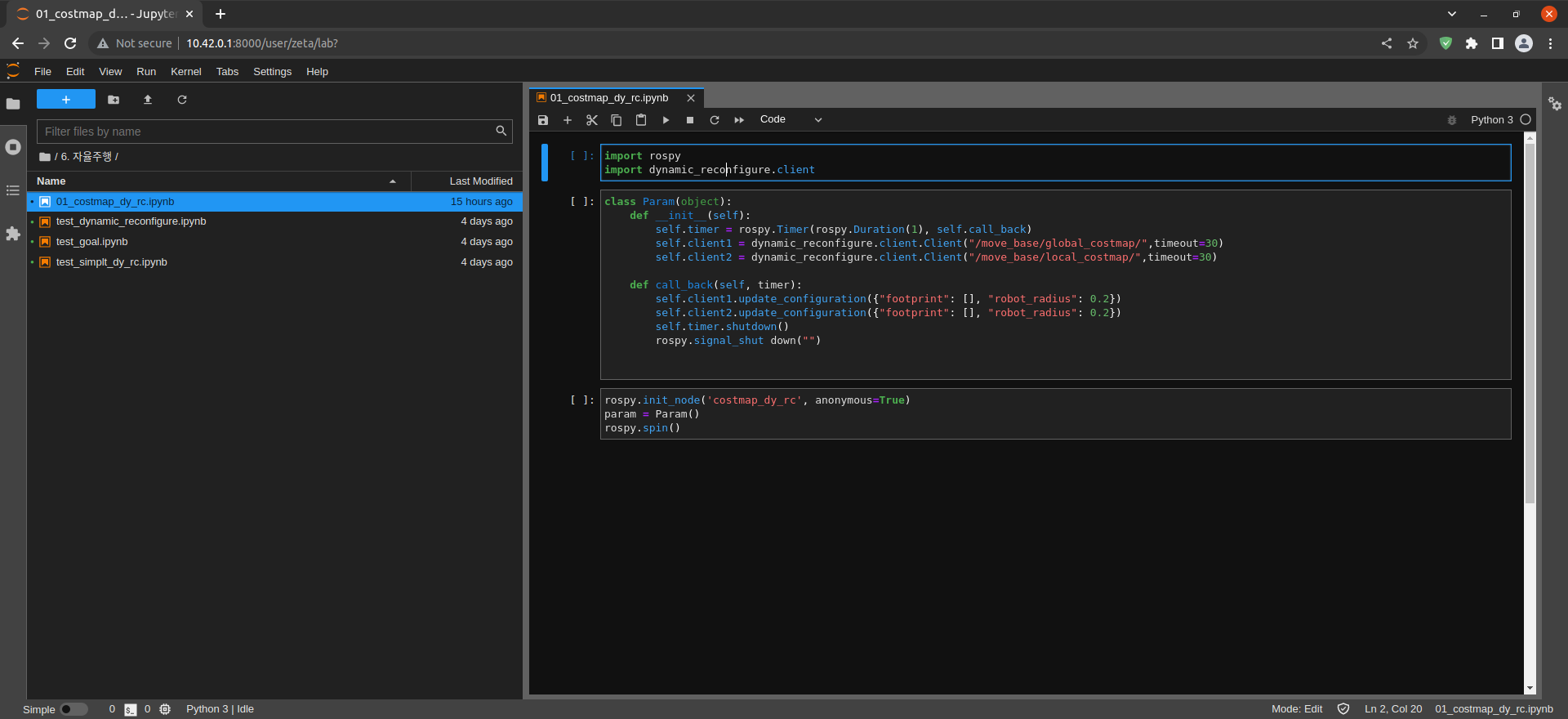
import rospy
import dynamic_reconfigure.client
Import the rospy module
Import dynamic_reconfigure.client module
class Param(object):
def __init__(self):
self.timer = rospy.Timer(rospy.Duration(1), self.call_back)
self.client1 = dynamic_reconfigure.client.Client("/move_base/global_costmap/",timeout=30)
self.client2 = dynamic_reconfigure.client.Client("/move_base/local_costmap/",timeout=30)
def call_back(self, timer):
self.client1.update_configuration({"footprint": [], "robot_radius": 0.2})
self.client2.update_configuration({"footprint": [], "robot_radius": 0.2})
self.timer.shutdown()
rospy.signal_shut down("")
Create Param(object) Class
Create init(self) function
Create ROS timer and designate callback
After creating client1, specify global_costmap of move_base Node in dynamic_reconfigure Client
After creating client2, specify local_costmap of move_base Node in dynamic_reconfigure Client
Create call_back(self, timer) function
Update the parameters of client1 to {“footprint”: [], “robot_radius”: 0.2}
Update the parameters of client2 to {“footprint”: [], “robot_radius”: 0.2}
Timer and ROS shutdown
rospy.init_node('costmap_dy_rc', anonymous=True)
param = Param()
rospy.spin()
Create costmap_dy_rc Node
Assign Param() Class to param variable