Processing Delay Publisher
1_1_처리지연_sender.ipynb
- Running the cell codeCtrl + Enter
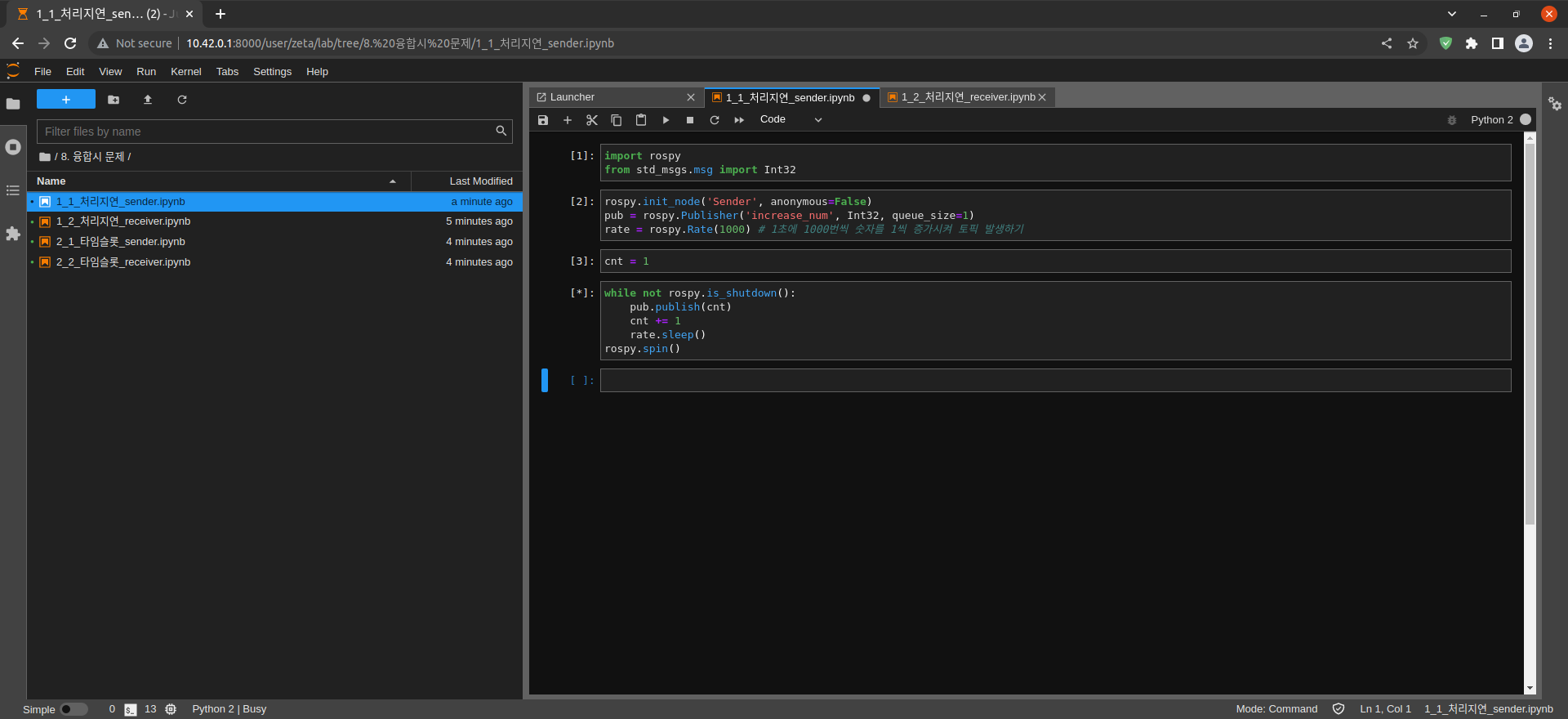
import rospy
from std_msgs.msg import Int32
Import rospy modules
Import Int32 from std_msgs.msg module
rospy.init_node('Sender', anonymous=False)
pub = rospy.Publisher('increase_num', Int32, queue_size=1)
rate = rospy.Rate(1000) # Generate a topic by incrementing the number by 1 1000 times per second
Create Sender Node
increase_num Topic Publish
Set it to have a rate of 1000hz (1000 executions per second)
cnt = 1
set the variable cnt to 1
while not rospy.is_shutdown():
pub.publish(cnt)
cnt += 1
rate.sleep()
rospy.spin()
Set to publish cnt Message and increase cnt value by 1 when rospy is running